
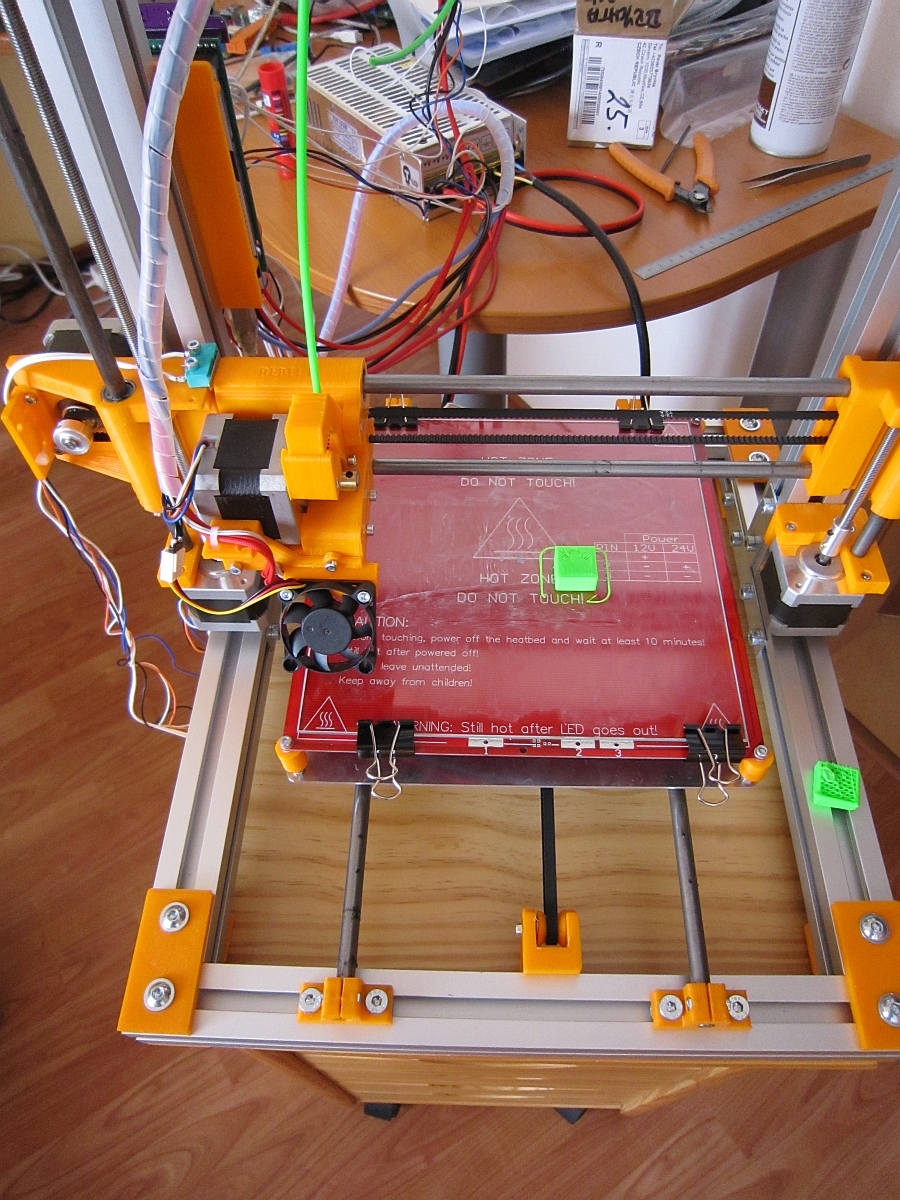
 Po sestavení tiskárny a počátečním nastavení elektroniky (napětí na RAMPS pro krokové motory) bylo možné přikročit k prvním tiskům… Tisk první testovací kostky moc nevyšel – nedošlo mi, že extruder je prázdný a je třeba jej nejdříve naplnit filamentem, takže materiál začal opouštět trysku ve chvíli, až byla cca 1mm nad podložkou. To mělo za následek to, že se kostička po několika vrstvách odloupla z podložky a já aspoň měl příležitost vyzkoušet havarijní zastavení tisku 🙂 .
Po sestavení tiskárny a počátečním nastavení elektroniky (napětí na RAMPS pro krokové motory) bylo možné přikročit k prvním tiskům… Tisk první testovací kostky moc nevyšel – nedošlo mi, že extruder je prázdný a je třeba jej nejdříve naplnit filamentem, takže materiál začal opouštět trysku ve chvíli, až byla cca 1mm nad podložkou. To mělo za následek to, že se kostička po několika vrstvách odloupla z podložky a já aspoň měl příležitost vyzkoušet havarijní zastavení tisku 🙂 .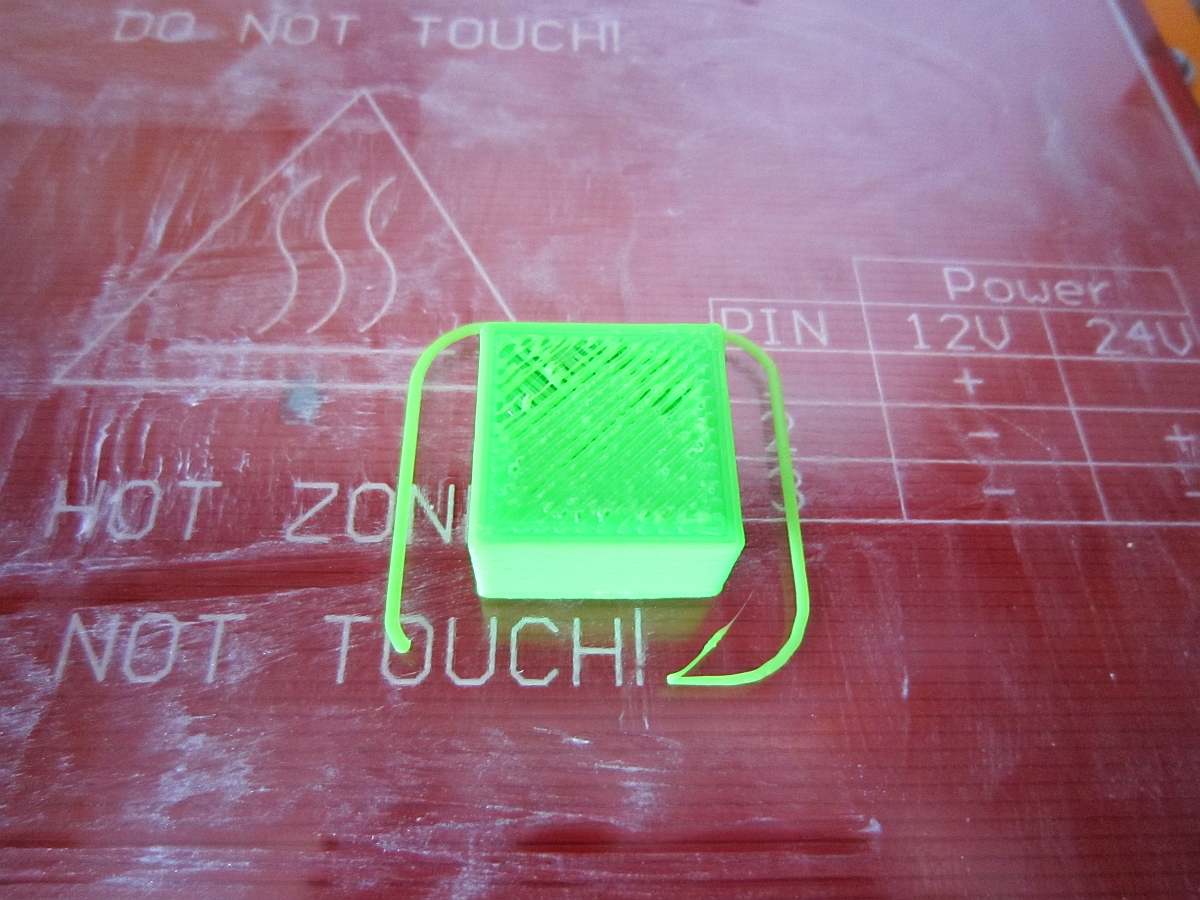 Tisk druhé kostky se ale už naštěstí povedl… Nedokonalost horní vrstvy byla způsobena nepravidelností dodávky filamentu, jak jsem později zjistil.
Tisk druhé kostky se ale už naštěstí povedl… Nedokonalost horní vrstvy byla způsobena nepravidelností dodávky filamentu, jak jsem později zjistil.













Ahoj, všiml jsem si displeje, předpokládám, že jde i o SD čtečku pro tisk bez PC. Jaký firmware si použil a hlavně nějaký link na zapojení + info o HW na display a spol. by taky nebyl? Díky 🙂
Ahoj, ano – displej má i čtečku SD karet pro tisk bez počítače. Firmware je běžný Marlin se zapnutou podporou LCD. Displej je to třeba tenhle a zapojení v podstatě nemám – přídavná destička se zastrčila do RAMPS (jinak ani nešla), displej se propojil dvěma plochými kabely a bylo 🙂 …
dobry den, ctu Vas blog a tusim ze jste schopny mi poradit (nevim jestli to patri uplne sem, ale castecne ano).
Potreboval bych dostat z motorku nema 17 (SX17-1005LQCEF) co nejrychlejsi otacky, ale porad se mi to toci relativne pomalu (ramps deska, drivry 8825, 24V) a z arduina posilam co nejrychleji 1 a 0 s pauzou 1 cyklus, pomoci vasi knihovny
if (this->interval_motor.expired()) {
this->interval_motor.set(speed); // set new interval period
if (this->stepState == LOW)
this->stepState = HIGH;
else
this->stepState = LOW;
digitalWrite(this->step, this->stepState);
kde Speed =1;
ale rychlost mi stale nestaci, jak je mozne ji zvysit, popripade jake pouzit krokove motory mensi rychlejsi (zatizeni zarizeni je temer nulove). Jakym smerem se pri hledani ubrat, nebo fakt jsem na maximu rychlosti (chtel bych zustat u krokoveho motorku, ss motorku najdu dost)
dekuju za radu
Dobry vecer,
intervalova knihovna mela slouzit pro trosku pomalejsi casovani – je napojena na millis() a nejmensi jednotka kroku je tudiz 1ms, coz muze byt dost pomale. Mam pro Vas dva navrhy na reseni:
1. upravte knihovnu tak, abz misto millis() pouzivala micros() (i za cenu zhorseni presnosti mereni) – myslim ale, ze to nebude stacit, v kazdem pripade pak zkuste upravit jeste celou podminku, ktera otaci impulz na this->stepState = !this->stepState; podstatne to zrychli beh programu, ale i tak casovani na mikrosekundy uz bude asi mit velky jitter.
2. pokud nepotrebujete jemne polohovani na hrideli, tak vypnete mikrokrokovani na DRV (jumpery pod drivery na RAMPS). Pro bezne NEMA motory tusim plati ze je krok na 2 stupne, takze jedna otacka je pak 180 impulzu.
diky, prvni rada pomohla – to je to pouzivani cizich knihoven:)….(druhou uz jsem mel )
500us a uz se to toci optimalne, vic z toho asi nepujde
(kdyby nejaky ctenar mel typ na mensi rychlejsi serva patrne s horsim silovym momentem ocenil bych doporuceni)
diky moc za radu a rychlost
neni zac